Najbardziej newralgicznym stanem w pracy regulatora jest tzw. stan przejściowy, który występuje w chwili uruchomienia systemu. Można go najczęściej zaobserwować jako duża wartość sygnału błędu w chwili t=0. Ze względu na to, że jest to stan niebezpieczny dla obiektu, szczególnie w tym momencie kluczowy jest algorytm regulacji. W celu ochrony układu stosuje się różne techniki, takie jak np. powolne zmiany wartości zadanej, ograniczenie wartości sygnału pochodzących od części różniczkującej regulatora, różniczkowanie sygnału wyjściowego, a nie uchybu regulacji. Parametry regulatora dobiera się w taki sposób, aby zapewnić szybką i bezpieczną pracę całego układu od początku działania( od chwili t=0), do momentu osiągniecia przez sygnał wyjściowy stanu ustalonego (po ustaniu procesów przejściowych). Właściwy dobór nastaw regulatorów P, PI, PID, czyli parametrów kp, Ti, Td gwarantuje stabilna pracę każdego z układów regulacji automatycznej, a przede wszystkim odpowiednią jej jakość. Wybór kryteriów jakości regulacji jest dostosowany do potrzeb zachowania układu. Zachowanie systemu ocenia się na podstawie przebiegu sygnału błędu e(t) oraz specjalnie konstruowanych kryteriów jakości regulacji. 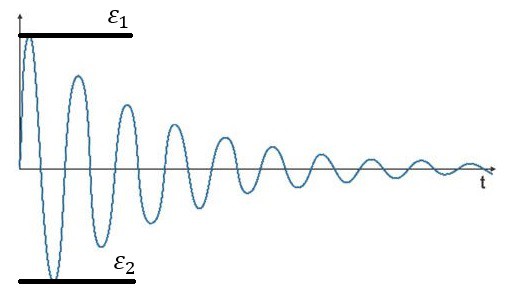
Spośród kryteriów nie wymagających dodatkowych obliczeń, a jednocześnie pozwalających ocenić jakość regulacji bezpośrednio analizując sygnał uchybu e(t) najpopularniejsze to:
-czas regulacji, czyli czas po którym błąd e(t) jest odpowiednio pliski eust. Kryterium to nazywane jest inaczej „metodą stopu”
-przeregulowanie
Wartości obu tych kryteriów analizuje się badając przebieg wartości sygnału uchybu regulacji e(t), przy wymuszeniu y0(t)=1(t). Podczas obliczania dwóch podanych wartości należy zapewnić aby błąd w stanie ustalonym eust=0.
Oprócz bezpośrednich wskaźników jakości regulacji stosuje się również wskaźniki całkowe, z których najczęściej stosowane to:
- całka z kwadratu uchybu (Integrated Square Error)
- całka z modułu uchybu (Integrated Absolute Error)
gdzie górna granica T jest czasem skończonym, wybranym w taki sposób aby było możliwe numeryczne obliczenie całki.
Podsumowując, możemy wyróżnić następujące kryteria oceny jakości regulacji, badając jego zachowanie w stanie przejściowym:
- czas regulacji,
- przeregulowanie,
- całka z kwadratu uchybu,
- całka z modułu uchybu.
Należy również zaznaczyć, że tym lepsza jest jakość regulacji, im mniejsze wartości osiągają powyższe wskaźniki.