Regulator jest to urządzenie działające w układzie automatycznej regulacji wytwarzające sygnał sterujący na podstawie sygnału uchybu regulacji. Transmitancja opisująca strukturę idealnego regulatora PID ma postać: 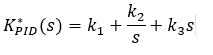
Powyższy zapis matematyczny nie uwzględnia w sposób jawny współczynnika proporcjonalności kp, stałych Ti oraz Td, a także inercyjności działania rzeczywistych elementów różniczkujących i całkujących w regulatorach PID. Przez zastosowanie tego uproszczenia transmitancja K*PID(s) reprezentuje strukturę równoległą (bez interakcji nastaw).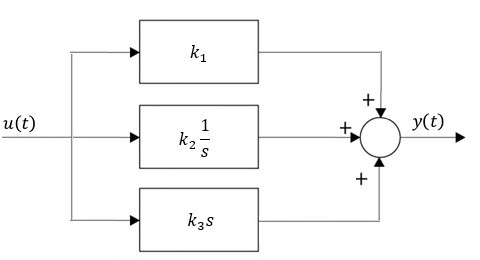
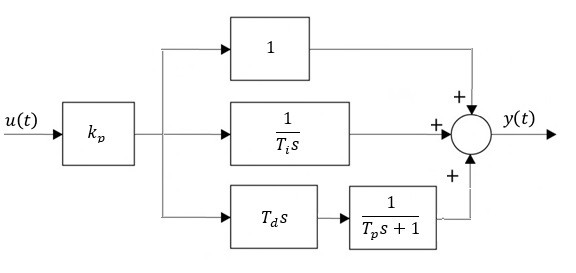
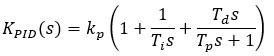
Transmitancja operatorowa rzeczywistego regulatora PID uwzględniająca „pasożytniczą” inercje członu różniczkującego o stałej czasowej Tp została przedstawiona poniżej.
Jest to struktura bardziej złożona, wyodrębniająca w sposób bezpośredni trzy podstawowe parametry (nastawy) regulatora PID:
Kp-współczynnik wzmocnienia
Ti–czas całkowania (zdwojenia)jest to czas potrzebny na to, aby przy wymuszeniu skokowym podanym na wejście regulatora PI sygnał wyjściowy regulatora podwoił swą wartość w stosunku do skoku początkowego spowodowanego działaniem proporcjonalnym.
Td–czas różniczkowania (wyprzedzenia)jest to czas po upływie którego, w przypadku podania na wejście regulatora PD sygnału narastającego liniowo, sygnał związany z działaniem proporcjonalnym zrówna się z sygnałem pochodzącym od działania różniczkującego
Struktura rzeczywistego regulatora PID została przedstawiona na poniższym rysunku.